News Story
How to steer a fish-inspired robot

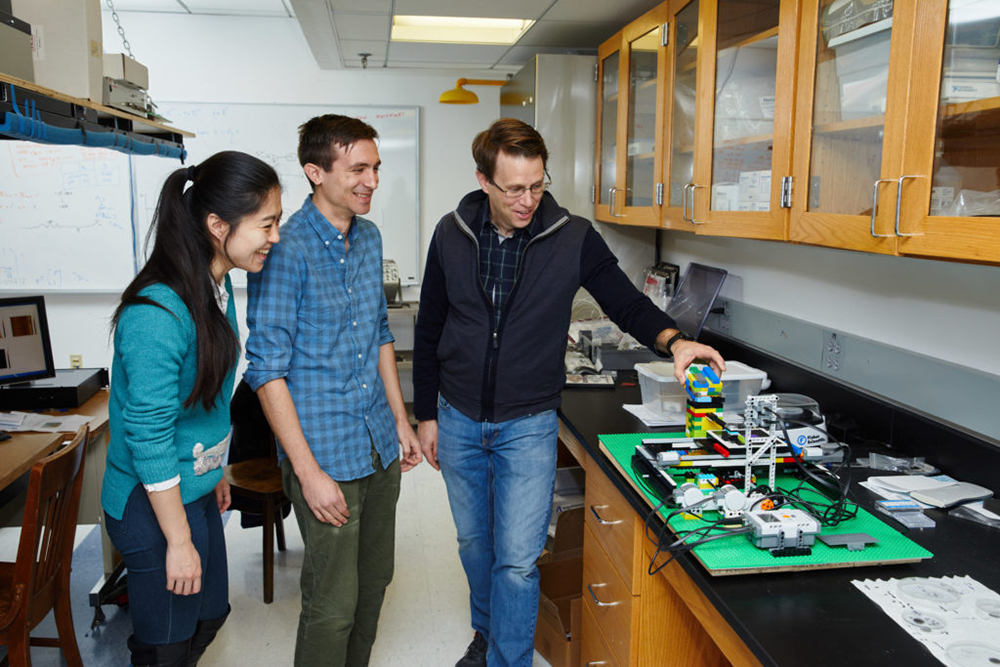
Qualisys motion capture cameras record the position of reflective markers mounted on the robot in the University of Maryland Neutral Buoyancy Research Facility. A ground-station computer running Qualisys Track Manager calculates the position and orientation of the robot using these marker locations. (Photo courtesy CDCL Lab)
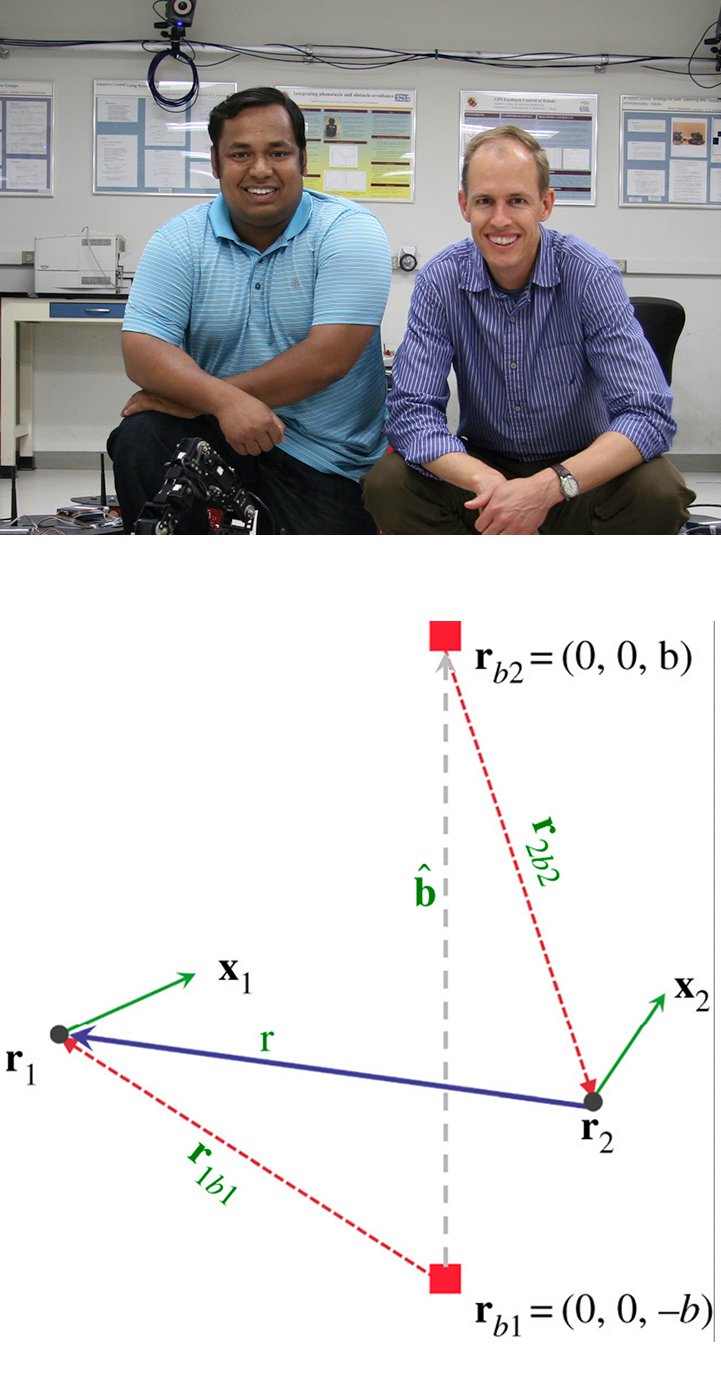
In a new paper in Bioinspiration and Biomimetics, Maryland Robotics Center Director Derek Paley (AE/ISR), his former student Brian Free (AE Ph.D. 2019) and current Ph.D. student Jinseong Lee take advantage of the analogy between the dynamics of a Chaplygin sleigh and a fish-inspired robot driven by a reaction wheel to present a state-feedback control law for steering the robot in a desired direction.
“Bioinspired pursuit with a swimming robot using feedback control of an internal rotor” also derives a condition under which pursuit by the robot is guaranteed. The authors demonstrate pure pursuit in an experiment with their prototype fish robot and show their feedback control law in theory, simulation, and experiment results in a steady, forward-swimming limit cycle in the desired direction.
Pursuit has long been a study of interest to researchers and engineers both for its mathematical elegance and its practicality for boats, planes, and missiles when intelligent guidance strategies are critical to mission success. Pursuit by autonomous underwater vehicles has applications in surveillance, ship inspection, and search and recovery.
A fish-inspired robot has several advantages over a traditional, propeller-driven underwater vehicle. Robots inspired by fish can perform rapid turning maneuvers because of their articulated or flexible bodies, energy-efficient locomotion and stealthy swimming. Some fish-inspired underwater vehicles have external actuators such as articulated fins, articulated tails, or even full body undulation articulated by many motors . Often these types of designs suffer from excessive noise or distinct acoustic signatures.
However, fish-inspired robotic vehicles also can be powered by internal reaction wheels. This type of locomotion is not noisy or acoustically distinct because the actuating component is inside the robot. The oscillatory motion of the robot under the effect of the reaction wheel causes the fish-shaped body to form and shed a vortex, propelling the craft forward.
Reaction wheels are typically used in satellites to orient the craft without the use of fuel. They work on the principle of conservation of angular momentum. As a heavy disc or wheel is accelerated by a motor in one direction, the body rotates in the opposite direction.
A mathematical analog between a fish-shaped robot with an internal reaction wheel and a Chaplygin sleigh with an internal reaction wheel has been found by taking advantage of a shared non-holonomic constraint. The connection between the Chaplygin sleigh and reaction-wheel propelled fish robot allows the relatively simple dynamics of the Chaplygin sleigh to be used in the control design and analysis for steering and propulsion of the fish robot.
The paper derives a condition under which capture by a “Chaplygin” robot fish is guaranteed. A common criterion for guaranteed capture is to show that the range between the predator and prey is always decreasing. Analysis of the two-agent range dynamics converts this criterion into a condition on the maximum heading deviation away from the desired swimming direction.
The result in the paper is extended to pursuit by allowing the desired direction to be a time-varying signal related to the line-of-sight angle between the predator and prey. Analysis of the pursuit geometry and the closed-loop system dynamics yields a condition that can be evaluated offline to determine whether a pursuit will be successful. Given knowledge of the prey’s maneuverability, this condition provides a go/no-go indication that can be implemented onboard a robot to determine if it is worth expending the resources to engage in pursuit. Experiments performed with feedback of prey direction from a motion capture camera system demonstrate the use of this type of pursuit in practice.
Ongoing work seeks to extend this work to multi-vehicle pursuit and schooling using a fleet of robotic fish.
Published March 23, 2020
Related Stories
Stories / March 8, 2023
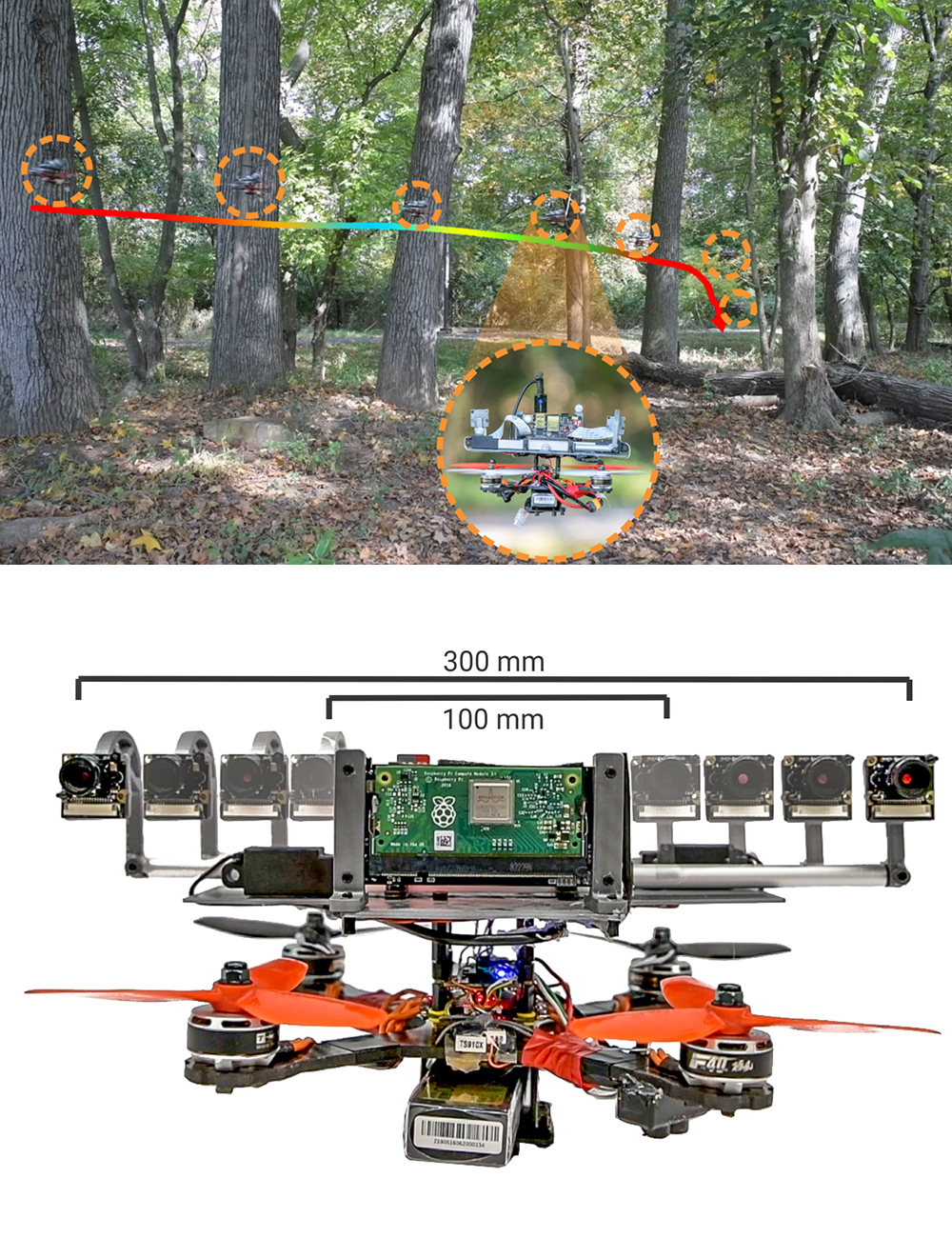
The Falcon and the Flock

Stories / February 20, 2023
Alumnus Udit Halder’s work published as cover article in...
Stories / February 3, 2021
'MorphEyes' stereo camera system improves quadrotor UAV...
Stories / May 6, 2020
ISR/ECE alumni collaborate on control paper published in PRS-A
Stories / July 3, 2023
ECE and ISR alumni feature prominently at American Control...
Stories / June 19, 2023
Alum Sean Andersson named Mechanical Engineering Department...
Stories / April 19, 2023
Chahat Deep Singh's robot bee work featured in BBC video

Stories / February 8, 2023
Levi Burner named a Future Faculty Fellow
Stories / December 8, 2022
Autonomous drones based on bees use AI to work together

Stories / February 14, 2022
Chahat Deep Singh named a Future Faculty Fellow
