Facilities
MRC faculty and affiliates preparing proposals: click here for a complete list of MRC facilities useful for inclusion in a proposal.
Orientation for new MRC users and training on MRC equipment is available. Please submit your requests to the Lab Manager at ipenskiy@umd.edu.
MRC Lab Materials & Equipment Request Form: Please log in to your UMD account before completing this form. Your input is valuable in helping us identify and prioritize new equipment needs.
MRC Facilities

Brin Family Aerial Robotics Lab

Robotics and Autonomy Laboratory

Robotics Manipulator Lab
Affiliated Facilities

Fearless Flight Facility (F3)

Maryland Autonomous Technology Research and Innovation Xploration (MATRIX) Lab
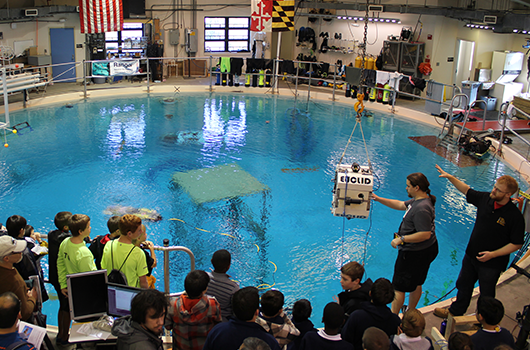
Neutral Buoyancy Research Facility
Principal Investigator(s): David Akin

UMD UAS Research and Operations Center (UROC)
Faculty Labs

Advanced Manufacturing Laboratory (AML)
Principal Investigator(s): Hugh Bruck
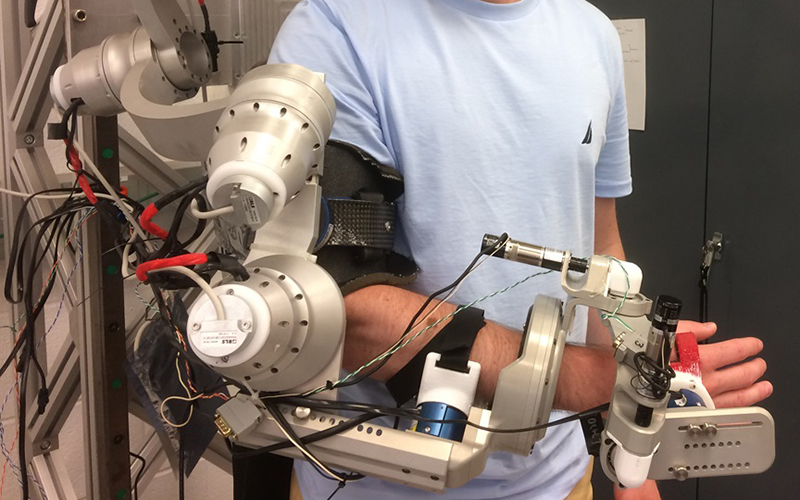
Advanced Robotics Development Laboratory
Principal Investigator(s): David Akin, Craig Carignan

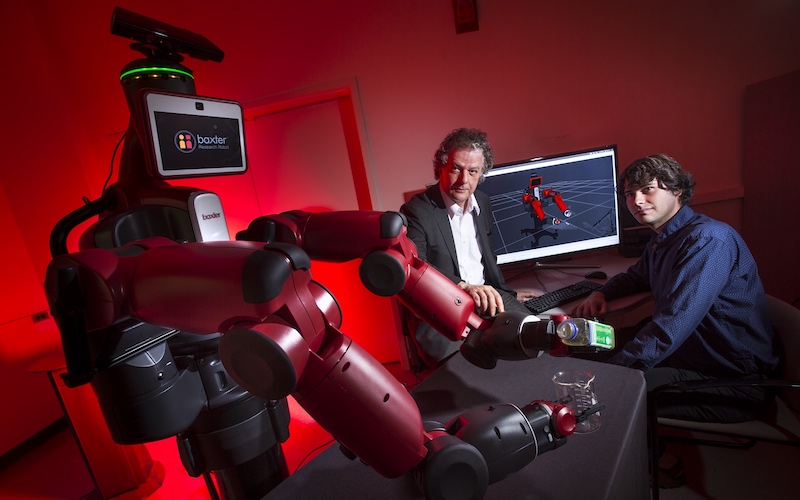
Autonomy Robotics Cognition Lab
Principal Investigator(s): John S. Baras, Yiannis Aloimonos, Don Perlis, Cornelia Fermüller

Bio-Imaging and Machine Vision Lab
Principal Investigator(s): Yang Tao

Bioinspired Advanced Manufacturing (BAM) Laboratory
Principal Investigator(s): Ryan D. Sochol

Collaborative Controls and Robotics Laboratory
Principal Investigator(s): Yancy Diaz-Mercado
Collective Dynamics and Control Laboratory
Principal Investigator(s): Derek A. Paley

Composites Research Laboratory (CORE)
Principal Investigator(s): Norman M. Wereley

Computational Sensorimotor Systems Laboratory (CSSL)
Principal Investigator(s): Timothy Horiuchi
Computer Vision Laboratory (CVL)
Principal Investigator(s): Cornelia Fermüller

CPS & Cooperative Autonomy Laboratory
Principal Investigator(s): Nuno Martins

Extended Reality Flight Simulation and Control Lab

IDEAL Lab
Principal Investigator(s): Mark D. Fuge
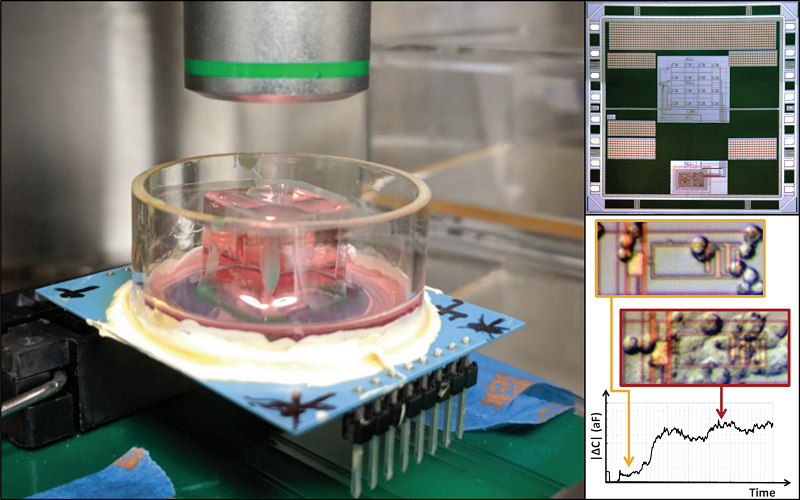
Integrated Biomorphic Information Systems Lab
Principal Investigator(s): Pamela Abshire
Intelligent Servosystems Laboratory
Principal Investigator(s): P. S. Krishnaprasad

Intelligent Systems Laboratory, Center for Technology and Systems Management
Principal Investigator(s): Bilal M. Ayyub

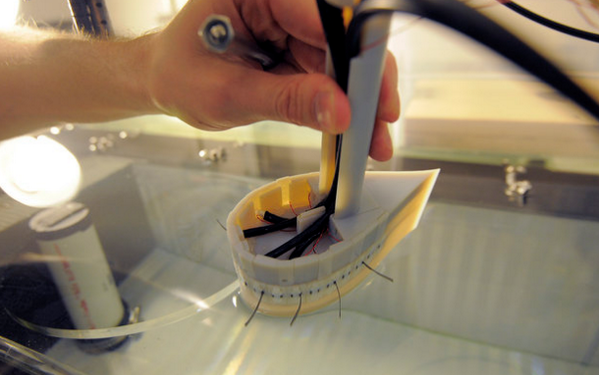
Laboratory for Microtechnologies
Principal Investigator(s): Elisabeth Smela