News Story
Alumnus Udit Halder’s work published as cover article in Proceedings of The Royal Society A
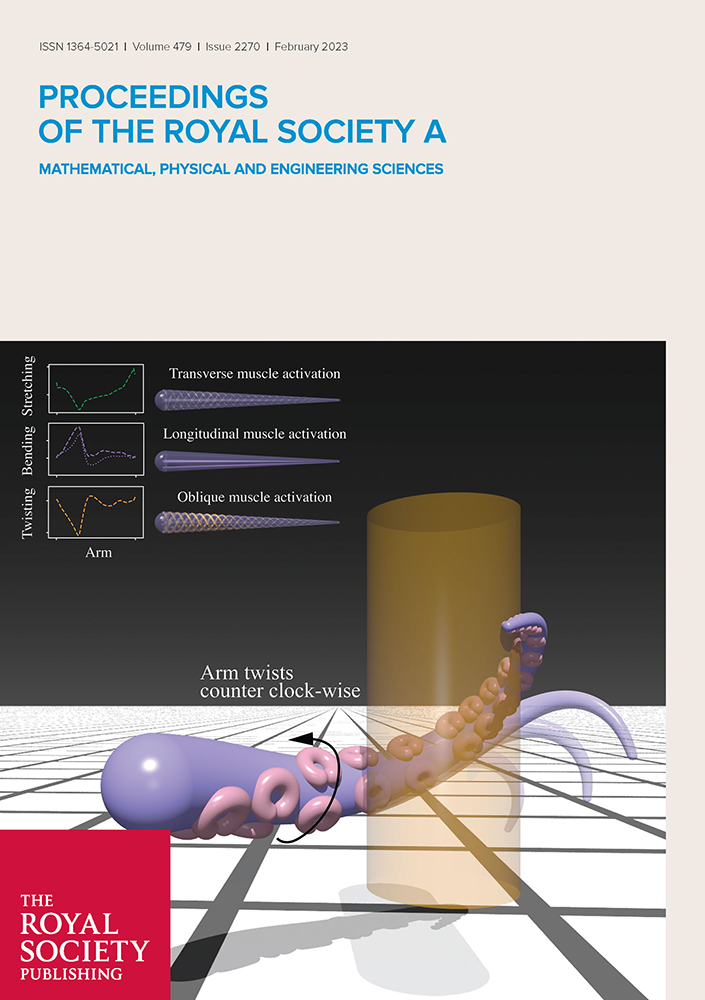
The dexterity of flexible octopus arms continues to attract the attention of both biologists and roboticists because of the arms’ exceptional ability to coordinate large numbers of degrees of freedom as they perform complex manipulation tasks. The arms are so versatile because of their intricate musculature that contains three major types of muscles.
New research by University of Maryland alumnus Udit Halder (ECE PhD 2019), currently a postdoctoral researcher at the University of Illinois Urbana-Champaign (UIUC), and his colleagues there presents physiologically accurate mathematical models of the three muscle types. “Energy-shaping control of a muscular octopus arm moving in three dimensions” was published as the cover article in Proceedings of The Royal Society A on Feb. 1, 2023.
In addition to Halder, the article was authored by Heng-Sheng Chang, Chia-Hsien Shih, Noel Naughton, Mattia Gazzola, and Prashant G. Mehta, all of UIUC. Halder works in the UIUC Coordinated Science Laboratory; at Maryland, he was advised by Professor P. S. Krishnaprasad (ECE/ISR) and his thesis dealt in part with continuum models for flocks.
The researchers for the first time express each of the three types of muscles in terms of a stored energy function. This modeling approach enables efficient energy-shaping control of the arm for three-dimensional motions such as reaching and grasping, and opens the door to applying energy-based modeling and control methods to a broader class of slender bodies, such as soft robotic manipulators.
The three-dimensional model is equipped with biomechanically realistic muscle actuation and considers internal forces and couples exerted by all major muscle groups. An energy-shaping control method is described to coordinate muscle activity in order to carry out grasping and reaching in 3D space. The paper includes a mathematical formulation for muscle activations based on a stored energy function, and develops a computationally efficient procedure to design task-specific equilibrium configurations, obtained by solving an optimization problem in the Special Euclidean group SE(3).
Muscle controls are iteratively computed based on the co-state variable arising from the solution of the optimization problem. The approach is numerically demonstrated in the physically accurate software environment Elastica. The results of numerical experiments mimicking observed octopus behaviors are reported.
Octopuses and soft robots
Interest in soft robots, specifically soft continuum arms, comes from their potential ability to perform complex tasks in unstructured environments as well as to operate safely around humans, with applications ranging from agriculture to surgery. The hyper-flexible octopus arm is a bio-inspiration with virtually infinite degrees of freedom, able to seamlessly generate a multitude of motions such as reaching, grasping, fetching, crawling or swimming. Much of the challenge of understanding how the arm works comes from the intricate organization and biomechanics of the three major muscle groups—transverse, longitudinal, and oblique—which add to the overall complexity of the problem.
The article’s biophysical model captures the three-dimensional motion of the arm. It uses the formalism of the Cosserat rod theory, where a key concept is the stored energy function of nonlinear elasticity theory—the internal forces and couples of a hyperelastic rod are obtained as the gradients of the stored energy function. UMD Distinguished University Professor Emeritus Stuart Antman (Math/IPST), a former ISR-affiliated faculty member, advanced this theory in his Springer book, Nonlinear Problems of Elasticity.
“Antman’s book was highly influential for me in grasping the ideas of nonlinear elasticity,” Halder said. “Also, the continuum models of flocking I studied in my PhD thesis helped me transition smoothly to understanding the continuum mechanics of flexible octopus arms.”
Mathematical models for all major muscle groups are described in terms of the forces and couples that they generate on a single Cosserat rod representing the arm. The muscles are described via a generalized notion of muscle stored energy function. The total potential energy of the arm is then expressed by the summation of the passive elastic energy and active muscle potential energy, modulated by muscle control inputs. The paper extends the energy concept for bio-physical modeling of the internal muscles and model-based control design.
Future work will discuss the biological implications of the energy-based control method. In addition, the researchers are excited to collaborate with roboticists to incorporate the mathematical ideas of their work into real soft robot design and control. This will not only provide a systematic way of controlling soft robots, but will also provide a deeper understanding of their working mechanisms.
| Read UIUC's version of this story here |
Published February 20, 2023
Related Stories
Stories / March 8, 2023
The Falcon and the Flock

Stories / July 3, 2023
ECE and ISR alumni feature prominently at American Control...
Stories / June 19, 2023
Alum Sean Andersson named Mechanical Engineering Department...
Stories / December 9, 2021
Alum Nitin Sanket wins Larry S. Davis Doctoral Dissertation...

Stories / February 3, 2021
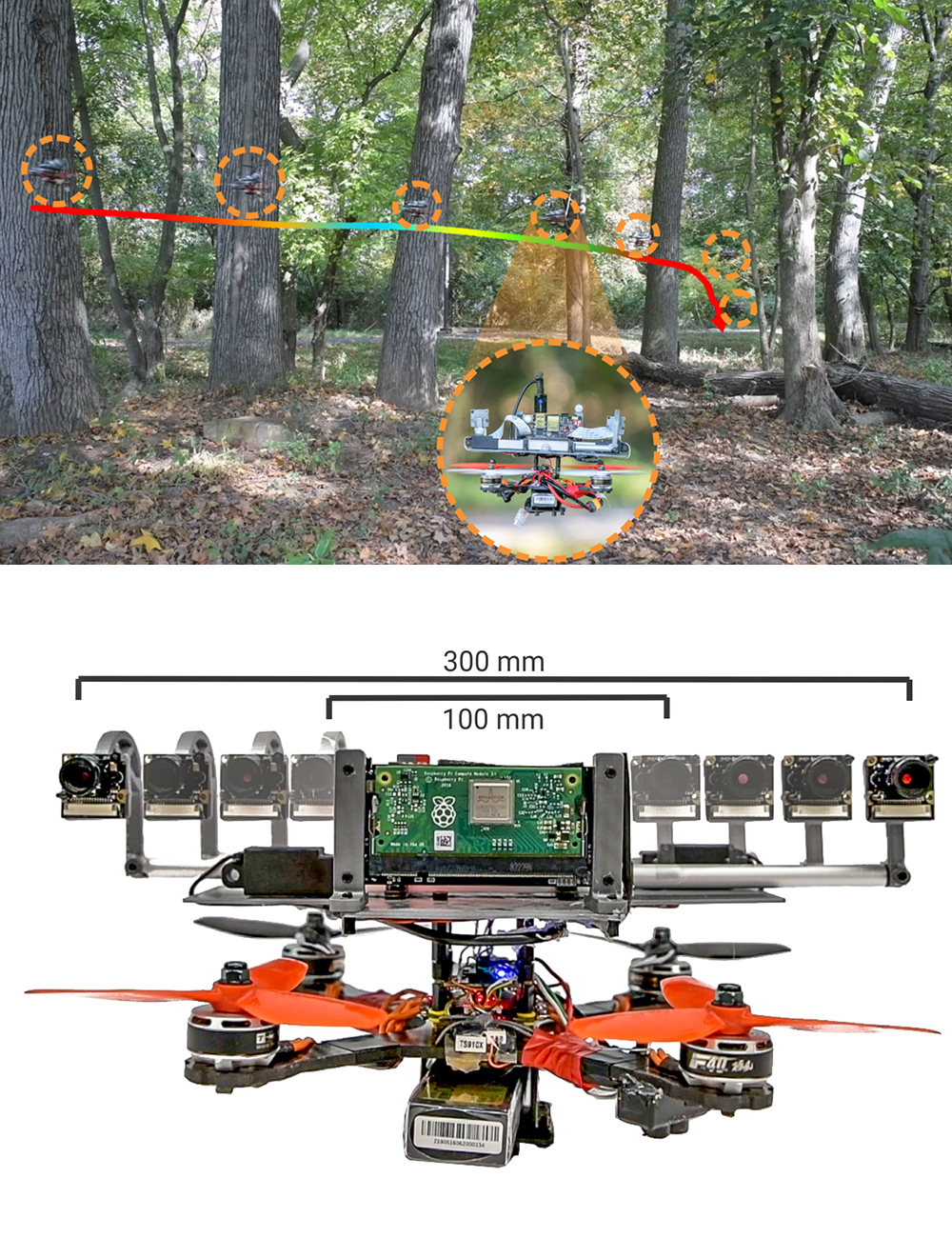
'MorphEyes' stereo camera system improves quadrotor UAV...
Stories / May 6, 2020
Alumnus Kevin Galloway earns tenure at the U.S. Naval Academy

Stories / May 6, 2020
ISR/ECE alumni collaborate on control paper published in PRS-A
Stories / March 23, 2020
How to steer a fish-inspired robot

Stories / March 12, 2020
New model predictive control framework improves reactive...

Stories / January 22, 2020
Clark School researchers test decentralized task allocation...