News Story
Research Experiences for Undergraduates in Bio-Inspired Robotics

The Maryland Robotics Center is currently hosting a Research Experiences for Undergraduates (REU) Site in Bio-inspired Robotics with Professor Hugh Bruck as the principal investigator (PI) and Professor Timothy Horiuchi as the co-PI. This is the third and final year of this program which started in the summer of 2017. The REU Site in Bio-inspired Robotics follows a three-year successful REU Site in miniature robotics which was offered three consecutive summers starting in 2014.
Funded by the National Science Foundation, the REU Site Program provides research opportunities for approximately 10 undergraduate students during the summer. Selected students come from different universities throughout the US. They are matched with faculty and other researchers at a host institution and assigned research projects suitable to that summer’s research theme. NSF provides a stipend to the participating students and assistance with housing and travel.
During the 10-week summer program, students not only engage in research projects but also attend lunch-time technical and non-technical tutorial seminars and visit local government labs involved in bioinspired robotics research. They attend professional and academic development seminars, and tour Maryland’s top-notch facilities supporting robotics research including, this year, Terrapin Works Facilities, the Neutral Buoyancy Research Facility, and the Robot Realization Laboratory. The program culminates in a final session where students utilize the skills discussed with them during some of the summer seminars to present their summer research in a mock, conference-style presentation. Past final presentation topics included a variety of bio-inspired robotic and engineering topics.
The list of summer of 2017 topics included, “Dynamic Morphing Wings for Robo Raven”, “Integration of High Efficiency Solar Cells in Robo Raven”, “How Did the Starfish Cross the Road? Designing Efficient Gaits for a Starfish-Inspired Robot”, “Data-Informed Modeling of Milligram-Scale Robot Locomotion”, “Enabling Robust Legged Locomotion at the Milligram Scale”, “Quadcopter Lateral Thrust Control”, “Characterizing Propylene Carbonate for Fluidic Actuation”, “Compliant Touch-Sensing Skins for Co-Robots”, “Actuation of Acoustic Metamaterials for Biomimetic Robotic Applications”, and “Mechanical Performance of Dexterous Manipulators for Use on a Cube Satellite”.
The list of summer of 2018 topics included, “DYCOMAX: Dynamic Coupling Manipulator Experiment”, “Pneumatically Actuated Flapping-Wing Air Vehicle”, “Optimization of Acoustic Metamaterials for Bat-Inspired Autonomous Robot Navigation”, “Multimaterial springs for Jumping Micro Robots”, “Sonar Place Recognition”, “Design of Compliant Substrates for Small Robot Testing”, “ Multifunctional Flexible Battery Integration on Robo Raven Wings”, and “Creating a Test Bed for the Electromagnetic Formation Flight of Satellites.”
Published June 3, 2019
Related Stories
Stories / July 24, 2023
STEM Summer Camp Covers 3D Printing, Drones, and More

Stories / April 19, 2023
Chahat Deep Singh's robot bee work featured in BBC video

Stories / March 8, 2023
The Falcon and the Flock

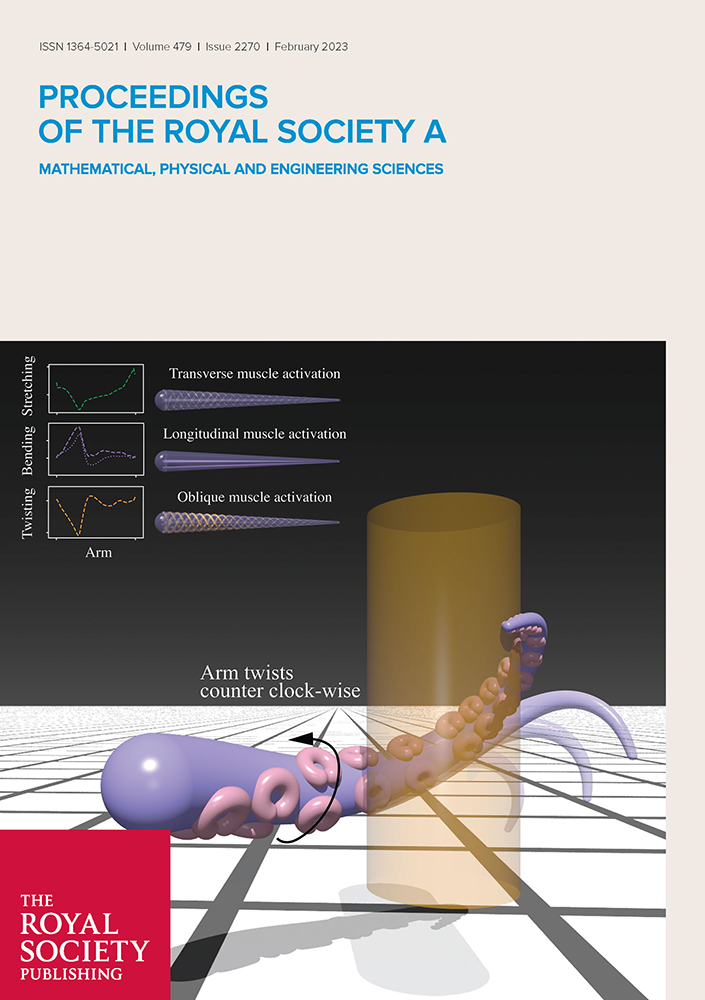
Stories / February 20, 2023
Alumnus Udit Halder’s work published as cover article in...
Stories / December 8, 2022
Autonomous drones based on bees use AI to work together

Stories / February 14, 2022
Chahat Deep Singh named a Future Faculty Fellow

Stories / February 7, 2022
MRC and MAGE Earn ARM Institute Endorsement

Stories / December 9, 2021
Alum Nitin Sanket wins Larry S. Davis Doctoral Dissertation...

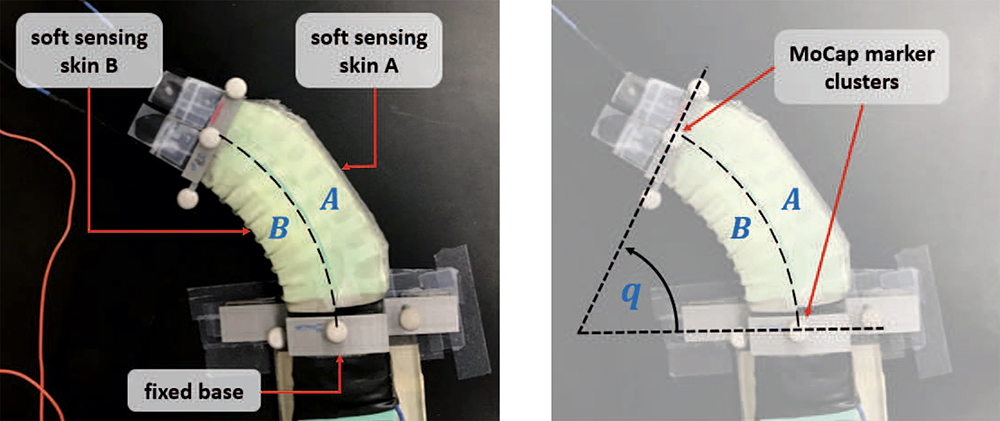
Stories / February 13, 2021
Stretchable, soft sensing skins for robots
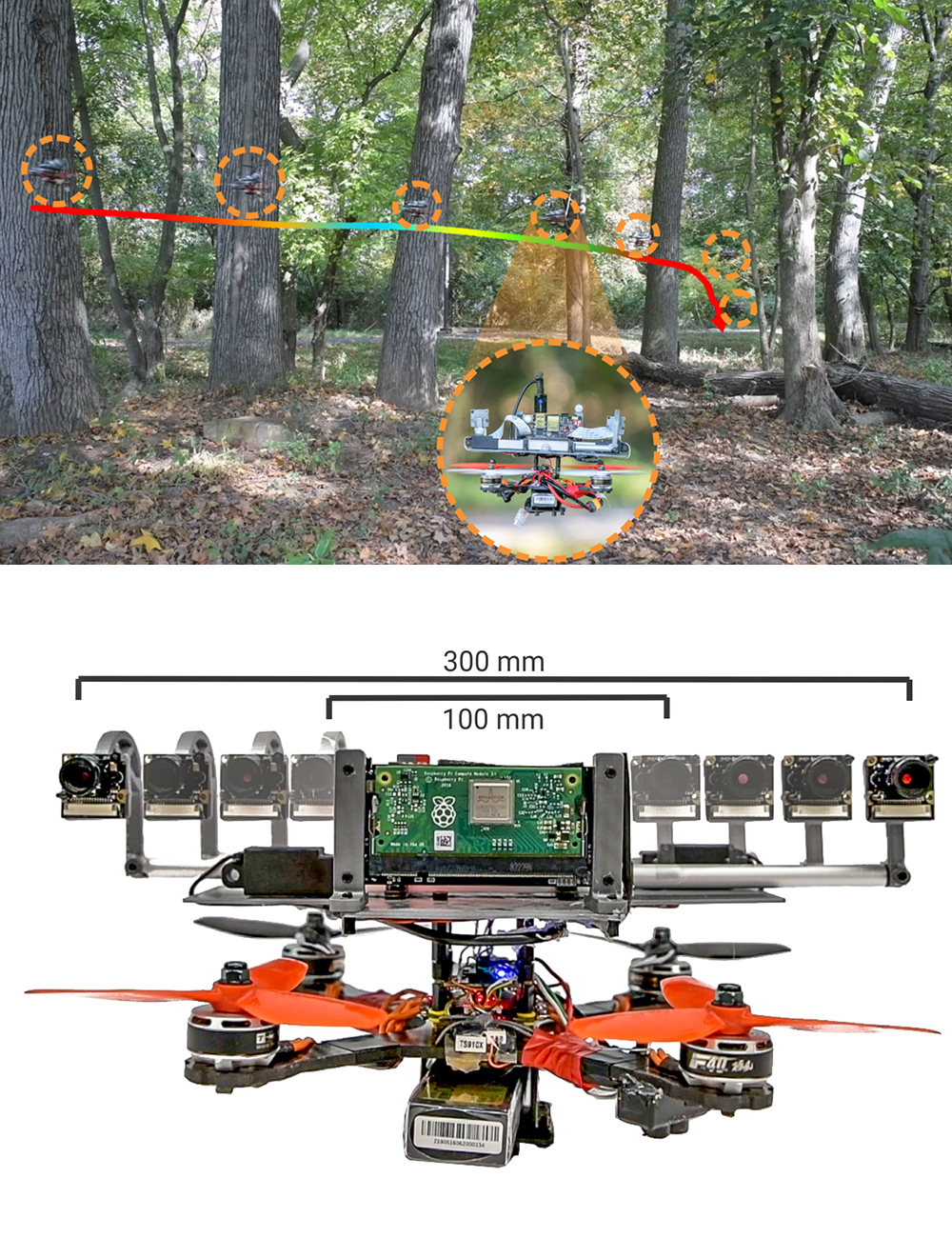
Stories / February 3, 2021
'MorphEyes' stereo camera system improves quadrotor UAV...