News Story
Accolades abound for graduating ECE Ph.D. student Nilesh Suriyarachchi

Graduating Electrical and Computer Engineering Ph.D. student Chethana Nilesh Suriyarachchi will be joining Nokia Bell Labs as a robotics engineer in May 2023. At Maryland, Nilesh has been advised by Distinguished University Professor John Baras (ECE/ISR). His Ph.D. research focused on planning and control for autonomous vehicles, particularly connected autonomous vehicles (CAVs).
Nilesh successfully defended his Ph.D. thesis on April 5, 2023. “Cooperative Multi-agent Sensing, Planning, and Control for Connected Autonomous Vehicles” proposes methods and associated algorithmic implementations, through which CAVs can contribute to solving persistent problems that have plagued road and highway infrastructure for decades. His thesis provides solutions to problems such as highway merge junction bottlenecks, highway traffic shock waves, and unsignalized intersection management. His solutions are made possible by harnessing the communication capabilities of CAVs, whether they are operating in fully autonomous traffic or mixed traffic (where CAVs coexist with human driven vehicles). Nilesh’s algorithms for communication-based CAV control allow for safer operation with improved global throughput of traffic flow. In addition, the ability of cooperative CAV control to reduce overall fuel consumption levels is also notable.
Honors as a graduate student
Nilesh has received many honors during his graduate career. He was recently announced as a 2023 ECE Distinguished Dissertation Fellow, and he was a Maryland Robotics Center GRA for the 2022–2023 academic year. He also gave a talk on connected autonomous vehicles at the KTH Integrated Transport Research Laboratory in Spring 2021.
"Real-Time Priority-Based Cooperative Highway Merging for Heterogeneous Autonomous Traffic," a paper about connected autonomous vehicles written by Nilesh, Baras, and two other ECE Ph.D. students advised by Baras—Faizan Tariq and Christos Mavridis—won the Best Student Paper Award at the 2021 IEEE International Conference on Intelligent Transportation Systems (ITSC). ITSC is the flagship IEEE conference in intelligent transportation.
Nilesh successfully completed several prestigious summer internships, including at Mitsubishi Electric Research Laboratories, where he contributed to coordinated control of mixed traffic and traffic light systems (2022); Nokia Bell Labs, where he worked on cloud-based autonomous indoor VSLAM and navigation (2020); and STEER Tech, where he focused on navigation and control problems for autonomous vehicle parking (2019).
Work in connected autonomous vehicles
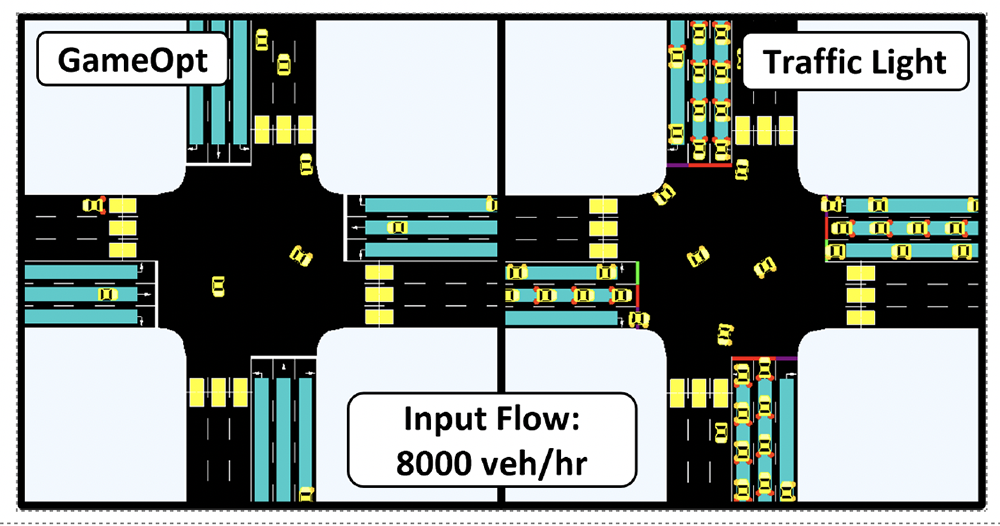
Unsignaled intersections. Intersections without traffic signals are the sites of 40% of all crashes, 50% of serious collisions, and 20% of fatalities. When motorists approach these intersections, which often have “four-way” stop signs and feature “unprotected” left turns, they must make choices. If two vehicles approach at approximately the same time, or a driver decides not to stop or wait their turn, safety is at issue. In the future, autonomous vehicles equipped with vehicle-to-infrastructure (V2I) communication may be able to provide solutions for handling these scenarios, and Nilesh has developed algorithms focused on the unsignaled intersection problem.
GAMEOPT: Optimal Real-time Multi-Agent Planning and Control for Dynamic Intersections was written by Nilesh and Baras, along with ISR-affiliated Distinguished University Professor Dinesh Manocha (ECE/UMIACS/CS) and his Ph.D. student Rohan Chandra. Learn more here.
Traffic shock waves. Traffic shock waves—the sudden slowing, speeding up, and renewed slowing of traffic—naturally occur when drivers hesitate or make sudden decisions when driving. They are easily generated by even the simplest of triggers, such as a few cars slowing down due to a distraction on the side of the road, busy merger junctions, minor collisions and road construction. In addition to being annoying, shock waves are a major contributor to increased fuel consumption on highways. They are a control problem that contributes to traffic congestion and degrades the efficiency of highway networks.
In Shock Wave Mitigation in Multi-lane Highways using Vehicle-to-Vehicle Communication, Nilesh and Baras show that the communication and sensing capabilities of modern CAVs will allow new approaches in control to help solve the problem of stop-and-go waves in highway networks. This research was presented in Fall 2021 at the IEEE 94th Vehicular Technology Conference.
A follow-up paper on the same topic, Multi-agent Deep Reinforcement Learning for Shock Wave Detection and Dissipation using Vehicle-to-Vehicle Communication, by Nilesh, Baras, and Ph.D. students Erfaun Noorani and Faizan Tariq, was presented at the IEEE 61st Conference on Decision and Control in December 2022. It proposes the use of a multi-agent shared policy reinforcement learning algorithm which leverages communication between CAVs for improved observability of downstream traffic conditions. A key feature of this method is the ability to perform shock wave dissipation control without the need for global information and the applicability of this method to multi-lane mixed traffic highways of arbitrary structure.
Highway merging. Highway on-ramp merges are major bottlenecks in transportation networks. CAVs, with their advanced sensing and communication capabilities, could provide an opportunity for algorithms to capitalize on the possibilities for vehicle cooperation.
Nilesh, Baras, and two other ECE Ph.D. students advised by Baras—Faizan Tariq and Christos Mavridis—won the Best Student Paper Award at the 2021 IEEE International Conference on Intelligent Transportation Systems (ITSC) for their paper, "Real-Time Priority-Based Cooperative Highway Merging for Heterogeneous Autonomous Traffic." The paper describes a way for CAVs to improve highway merging efficiency and safety with an algorithm that optimally coordinates CAVs to maximize the flow of vehicles, taking into account the varying priorities of different vehicle classes when selecting the best merging sequence.
Learn more
Read about the GAMEOPT unsignaled intersections algorithms developed in 2022.
Read about the shock wave mitigation algorithms developed in 2021 and 2022.
Read about the ITSC Best Student paper award to Nilesh and his student colleagues, from Fall 2021. View the slides from the presentation here.
Read about Nilesh’s talk on connected autonomous vehicles at the KTH Integrated Transport Research Laboratory in Spring 2021.
Published May 4, 2023
Related Stories
Stories / March 10, 2025
Developing Efficient Systems for Deep Sea Exploration

Stories / June 19, 2023
Alum Sean Andersson named Mechanical Engineering Department...
Stories / May 25, 2023
Baras, Sadler part of large ARL DataDrivER project

Stories / May 1, 2023
Just keep swimming, and schooling

Stories / January 19, 2023
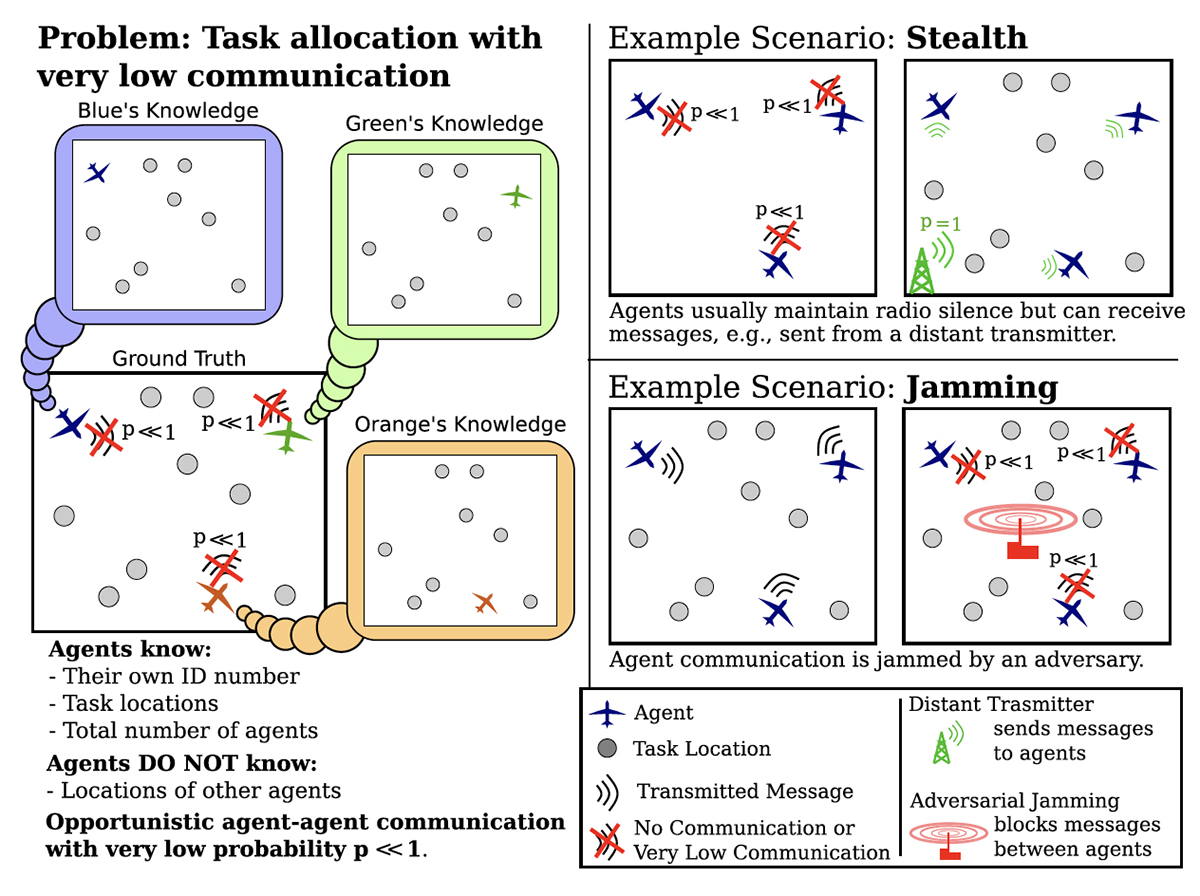
New algorithms for multi-robot systems in low communication...
Stories / January 5, 2023
ArtIAMAS receives third-year funding of up to $15.1M
Stories / December 14, 2022
Shuttle service between Kim Building and SMART Building/MATRIX...

Stories / December 14, 2022
Building bridges for technology research and education across...

Stories / April 11, 2022
UMD Researchers Eye Advances in Autonomy
Stories / March 7, 2022
New GAMEOPT framework will help future autonomous vehicles...