News Story
New GAMEOPT framework will help future autonomous vehicles safely navigate unsignalized intersections
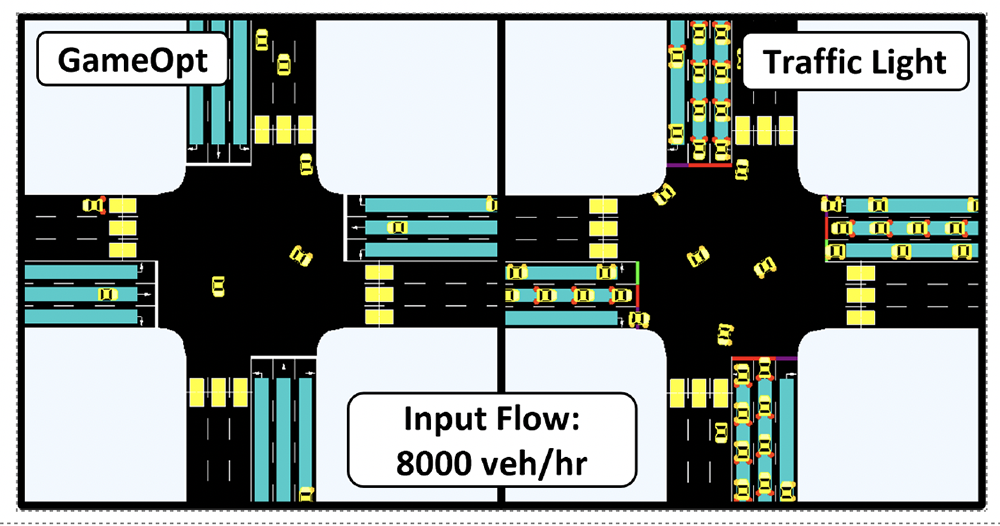
Fig. 1 from the paper. GAMEOPT vs. Traffic Lights: GAMEOPT is a new approach for optimal real-time planning and control in dynamic, multi-agent unsignalized intersections. In this figure, the light blue regions denote the control zone. At identical input traffic flow levels, GAMEOPT outperforms both signal-less and traffic light infrastructure, resulting in fewer queues and enabling smooth traffic flow.
Intersections without traffic signals are the sites of 40% of all crashes, 50% of serious collisions, and 20% of fatalities. When motorists approach these intersections, which often have “four-way” stop signs, and feature “unprotected” left turns, they must make choices. If two vehicles approach at approximately the same time, or a driver decides not to stop or wait their turn, safety is at issue.
In the future, autonomous vehicles equipped with vehicle-to-infrastructure (V2I) communication may be able to provide solutions for handling these scenarios. Such vehicles, called connected autonomous vehicles (CAVs), will be able to provide multiple sensing and actuation points in the traffic flow.
ISR faculty and students are developing new algorithms that will enable CAVs to handle these scenarios. They have previously successfully demonstrated CAV algorithms that can help smooth highway merging and traffic shock wave situations.
A new paper introduces algorithms focused on the unsignaled intersection problem. GAMEOPT: Optimal Real-time Multi-Agent Planning and Control for Dynamic Intersections was written by Distinguished University Professor John Baras (ECE/ISR) and his Ph.D. student Nilesh Suriyarachchi; and ISR-affiliated Distinguished University Professor Dinesh Manocha (ECE/UMIACS/ CS) and his Ph.D. student Rohan Chandra.
Recent research into leveraging cooperation among CAVs to achieve safe, fair, and efficient intersection control has provided promising results with solutions from many fields, including game theory, auctions, optimization, and deep learning. While each domain has its own advantages, no single solution has been shown to be able to achieve all the four key considerations of safety, efficiency, fairness, and real-time operation. Here, safety involves the prevention of collisions, efficiency involves maximizing the capacity of the intersection, and fairness involves treating all agents equitably. Real-time computation is also essential in this scenario, as the system must react to dynamic changes in this fast-paced environment.
GAMEOPT is a novel hybrid approach to cooperative intersection control for dynamic, multi-lane, unsignalized intersections. GAMEOPT first uses an auction mechanism to generate a priority entrance sequence for every agent, followed by an optimization-based trajectory planner that computes velocity controls that satisfy the priority sequence. This coupling operates at real-time speeds of less than 10 milliseconds in high density traffic of more than 10, 000 vehicles/hr, 100× faster than other fully optimization-based methods, while providing guarantees in terms of fairness, safety, and efficiency. The algorithm improves throughput by at least 25%, time taken to reach the goal by 75%, and fuel consumption by 33% compared to auction-based approaches and signaled approaches using traffic lights and stop signs.
The general multi-agent intersection control problem can be broadly divided into two phases. The planning phase involves the selection of the optimal entrance sequence (order in which vehicles enter the intersection) and the control phase involves generating safe trajectories for all the vehicles in order to achieve the selected sequence. The system then transmits the output target trajectories to each vehicles’ local controller for execution. Here, sequence selection can become very difficult as the number of possibilities grows exponentially with the number of vehicles. This is further complicated in multilane scenarios, which should allow multiple non-conflicting vehicles to enter the intersection at the same time to achieve optimal throughput. Additionally, practical intersection scenarios are dynamic, which means that the number of vehicles that request to cross the intersection changes with time.
GAMEOPT is the first hybrid planning and control algorithm for navigating unsignalized dynamic intersections by combining auctions with optimal control. The framework’s implications extend beyond intersection control to more general multi-agent systems, due to the challenging nature of dynamic mechanism design.
More information about GameOPT is available on this page.
Published March 7, 2022
Related Stories
Stories / March 3, 2020
A cooperative control algorithm for robotic search and rescue
Stories / January 19, 2023
New algorithms for multi-robot systems in low communication...
Stories / January 5, 2023
ArtIAMAS receives third-year funding of up to $15.1M
Stories / December 8, 2022
Autonomous drones based on bees use AI to work together

Stories / October 7, 2021
Best Student Paper Award for Baras students at ITSC 2021
Stories / May 26, 2021
UMD, UMBC, ARL Announce Cooperative Agreement to Accelerate AI,...

Stories / May 25, 2023
Baras, Sadler part of large ARL DataDrivER project

Stories / April 19, 2023
Chahat Deep Singh's robot bee work featured in BBC video

Stories / March 8, 2023
The Falcon and the Flock
Stories / July 21, 2022
UMD Team Wins Inaugural NIST UAS 3.1: FastFind Challenge