News Story
Pneumatically controlled soft robotic catheters offer accuracy, flexibility
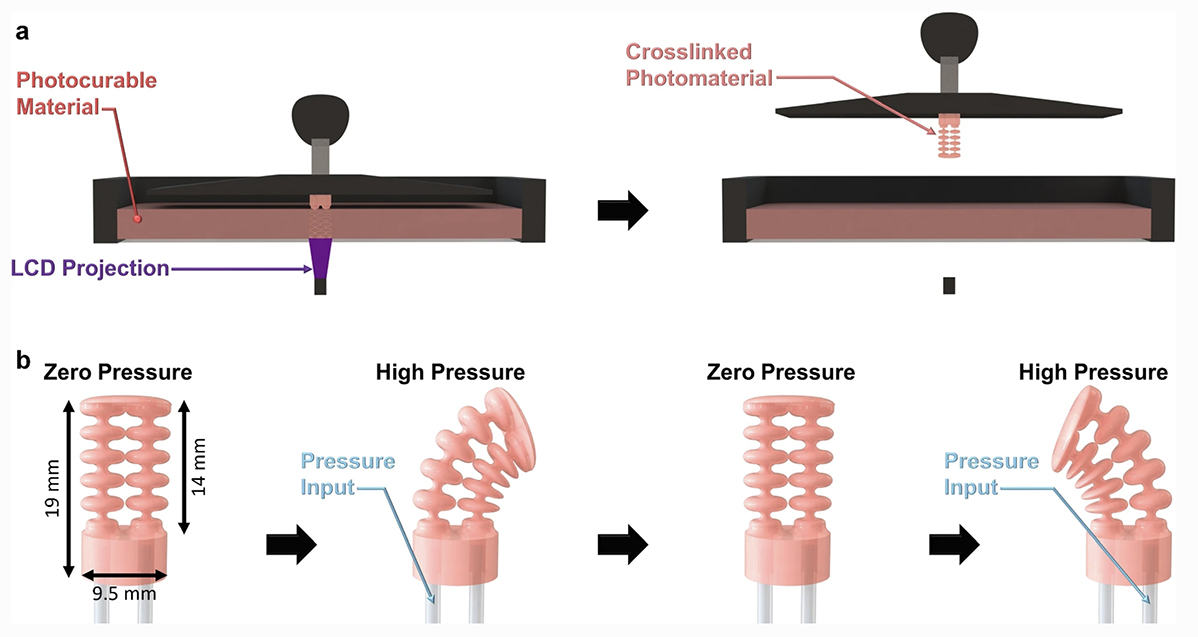
Fig. 2 from the paper. Manufacturing and operation of soft robotic catheter tip. a) Printing process for the soft robotic actuator. b) Pressurizing the leftmost channel inflates the bellows and bends the catheter to the right, while pressurizing the rightmost channel bends the catheter to the left. [Click graphic for larger view.]
During minimally invasive surgery, doctors maneuver flexible tools through narrow and complex body spaces. The procedures are more difficult if there is only a limited ability to control the position of the tools inside the body. Cable-driven systems are commonly used in commercial applications and have robust kinematics models, but the forces of friction make control difficult, especially when the instrument has traversed a long and tortuous path. Magnetic and fluid-driven systems have shown promise in circumventing this issue. But they introduce problems of their own, such as taking up a lot of space in the surgical suite. A pneumatically actuated soft robot system could offer more efficient design and control.
In a paper published in the July 2023 International Journal of Computer Assisted Radiology and Surgery, a team of mechanical engineers and medical researchers from the University of Maryland, Johns Hopkins University, and the University of Maryland Medical School offer a solution that improves control. Their new soft robotic system enables a user to simultaneously insert and bend a pneumatically actuated catheter tip with high accuracy in a short amount of time. The paper’s results show promise in improving outcomes in minimally invasive interventions.
“Towards a Novel Soft Robotic System for Minimally Invasive Interventions” was written by University of Maryland mechanical engineering Ph.D. students Olivia Young and Adira Colton; their advisor, ISR-affiliated Associate Professor Ryan Sochol; Johns Hopkins University Ph.D. student Noah Barnes (the lead author), Assistant Research Scientist Xiaolong Liu, Assistant Professor Jeremy Brown, and Assistant Professor Axel Krieger; and Associate Professor Miroslaw Janowski and Professor Dheeraj Gandhi of the University of Maryland School of Medicine.
About the system
Surgeons using an effective minimally invasive robotic surgical system should be able to control its position accurately enough to navigate through small branch vessels in arteries and veins. As opposed to traditional robots with rigid links controlled by electromechanical motors, soft robots are today’s standard. They are made of flexible materials and are inherently safe and compliant.
Of course, improvement is still needed. For example, fluid-driven soft catheters use simple external control systems for navigation. By manipulating multiple channels, these instruments can be induced to bend in a particular direction. However, the channels need to be individually actuated by hand. The surgeon has to pause and tune the angle at key points as the instrument travels through the anatomy. It would be better for a catheter controller to be integrated into the “clinical workflow,” where traditionally, surgeons insert and rotate the catheter at the entry point.
The new steerable soft robot system developed in this paper allows the surgeon to manually insert the catheter while simultaneously controlling and adjusting the bend angle of the tip. The researchers have designed a macroscale 3D-printed catheter tip with two separately pressurized channels to induce bending in two directions. They also developed a motorized hand controller and performed a preliminary characterization of two catheter tip prototypes.
The system’s pneumatic actuation simplifies the mechanical and control architecture and provides an on-demand way to adjust the tip angle. This allows surgeons to intuitively control both bending and insertion without needing to manually pressurize individual channels.
In tests, the integrated robotic system enabled both a novice and a skilled surgeon to position the steerable catheter tip with sub-millimeter accuracy at the location of cylindrical targets. The novice was able to reach each target within ten seconds and the skilled surgeon within five seconds on average.
Published July 28, 2023
Related Stories
Stories / July 1, 2025
Robot-Assisted Triage: UMD Team Answers the Challenge

Stories / February 7, 2022
MRC and MAGE Earn ARM Institute Endorsement

Stories / October 28, 2020
MRC Faculty and Researchers to Present 16 Papers at...

Stories / May 13, 2019
Axel Krieger Gives Keynote Lecture at Visceral Surgery...

Stories / April 3, 2018
Raising the Bar on Precision

Stories / November 14, 2025
UMD’s Team RoboScout Delivers Again

Stories / October 23, 2025
MRC Seminar Series Starts with Jellyfish-Inspired Robotics

Stories / August 28, 2025
Passing the Torch: Maryland Robotics Center’s Next Chapter
Stories / August 14, 2025
New Research Helps Robots Grasp Situational Context

Stories / April 2, 2025
Tuna-Inspired Mechanical Fin Could Boost Underwater Drone Power
