News Story
NSF grant will further planning for collaborative autonomy testing infrastructure
Professor Jeffrey Herrmann (ME/ISR) is the principal investigator for a one-year, $100K National Science Foundation grant, Planning Infrastructure for Collaborative Autonomy Testing.
This project will lay the foundation for a modeling and simulation infrastructure to reduce R&D barriers and facilitate collaboration for autonomous systems. Co-PIs are Professor Derek Paley (AE/ISR), ISR-affiliated Professors Adam Porter (CS/UMIACS), and Dinesh Manocha (ECE/CS/UMIACS), and Assistant Professor Pratap Tokekar (CS/UMIACS).
Increasingly, robotics research is focusing on teams of autonomous ground robots and unmanned vehicles for both civilian and military purposes such as search-and-rescue, mining, material handling, and protecting secure facilities. Computer scientists and engineers are inventing and enhancing new algorithms that these autonomous systems will use to better collaborate with each other. Currently, testing the algorithms requires extensive time and resources spent in setting up and running simulation models, plus using other facilities needed in the processes of testing, evaluation, validation and verification.
This project will plan a more ideal community research infrastructure. Planning will include a broad-based community of researchers from multiple institutions, including experts in robotics systems, modeling and simulation, test and evaluation, and software engineering. The planning group will develop use cases, design infrastructure architecture and identify key partners.
A resulting proposal will include recommendations for hardware, software, APIs, user interfaces, libraries of models, a development and testing environment, and documentation.
Published September 30, 2021
Related Stories
Stories / May 25, 2023
Baras, Sadler part of large ARL DataDrivER project

Stories / April 19, 2023
Chahat Deep Singh's robot bee work featured in BBC video

Stories / March 8, 2023
The Falcon and the Flock

Stories / January 19, 2023
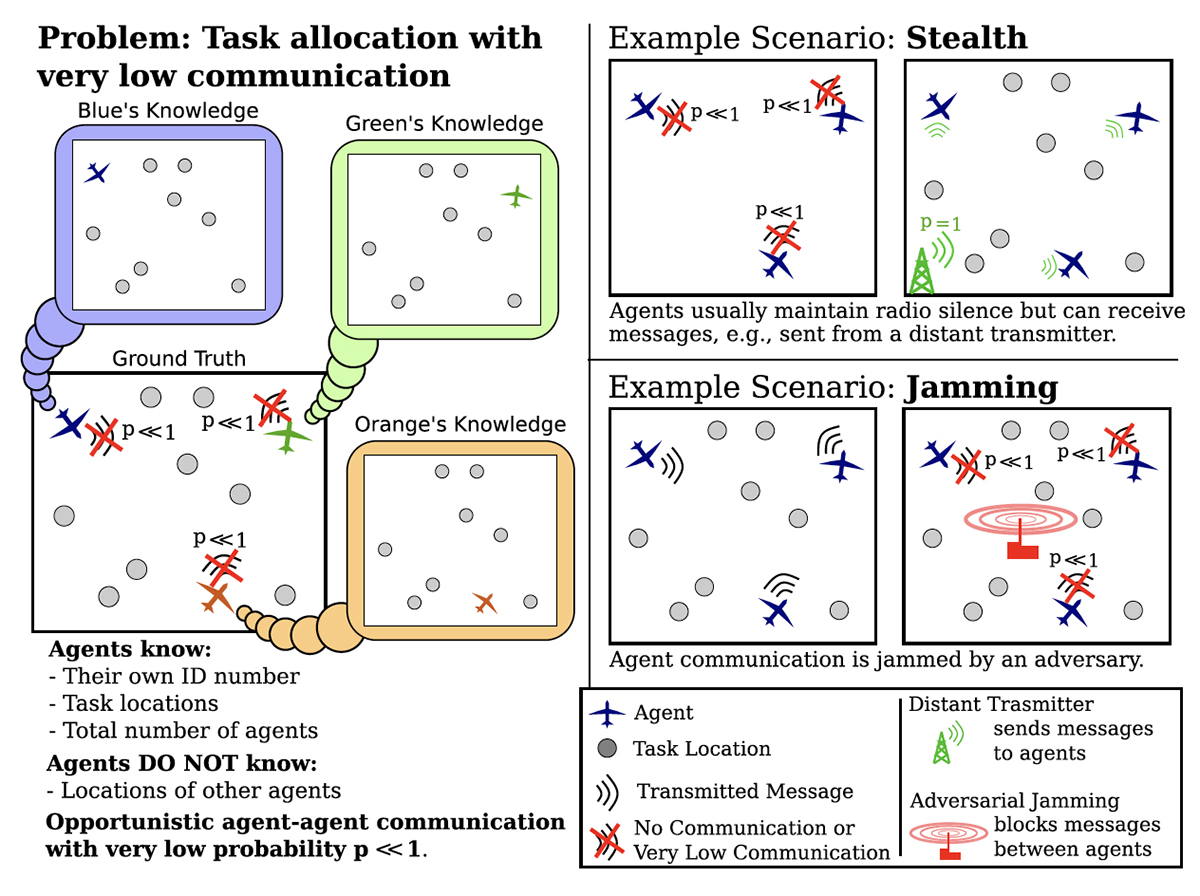
New algorithms for multi-robot systems in low communication...
Stories / January 5, 2023
ArtIAMAS receives third-year funding of up to $15.1M
Stories / December 8, 2022
Autonomous drones based on bees use AI to work together
Stories / October 21, 2022
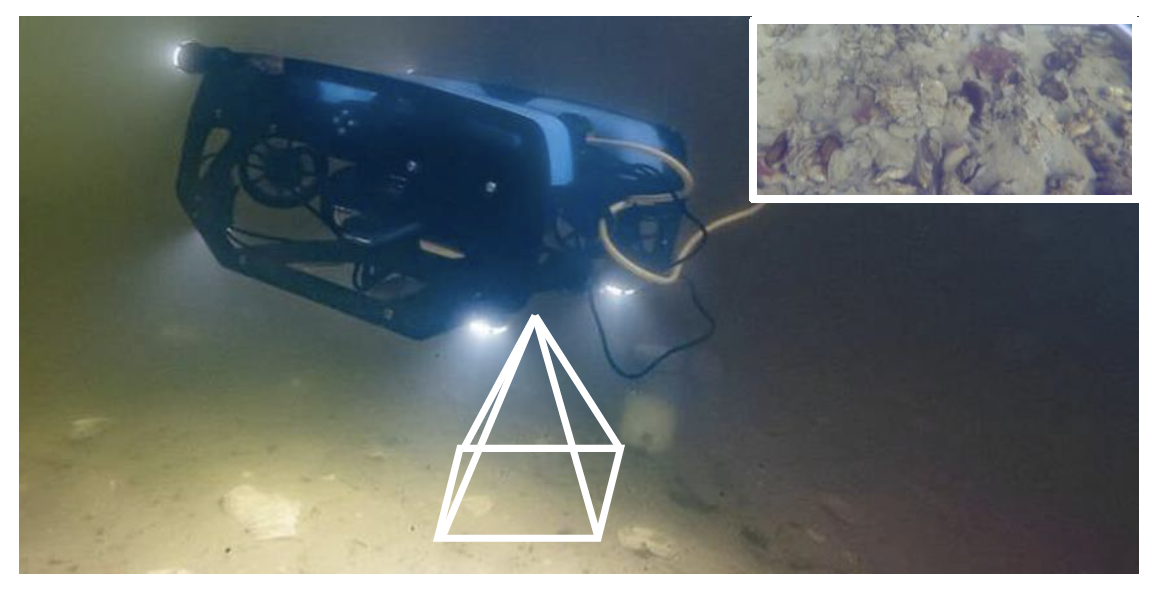
'OysterNet' + underwater robots will aid in accurate oyster...
Stories / April 2, 2022
ASTrA project to provide new tools for power generation,...
Stories / March 7, 2022
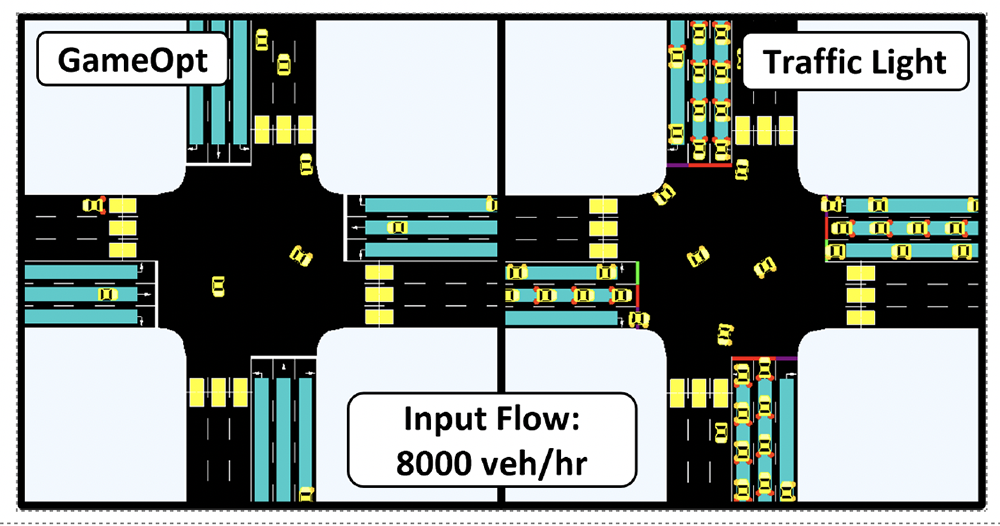
New GAMEOPT framework will help future autonomous vehicles...
Stories / December 9, 2021
Alum Nitin Sanket wins Larry S. Davis Doctoral Dissertation...
