Cognitive Robotics
Endowing a robot with intelligent behavior by providing it with a processing architecture that allows it to learn and reason about how to behave in response to complex goals in a complex world. Cognitive robots integrate perception, cognition and action.
Stories / May 16, 2023
New book by Jeffrey Herrmann: Metareasoning for Robots
Stories / March 8, 2023
The Falcon and the Flock
Stories / December 22, 2022
Aloimonos, Sandini contribute chapter to MIT Press book,...
Stories / April 2, 2022
ASTrA project to provide new tools for power generation,...

Stories / February 14, 2022
Chahat Deep Singh named a Future Faculty Fellow

Stories / December 20, 2021
2022 BBI Seed Grant Awards to Fuel Innovation in Aging and...

Stories / December 8, 2021
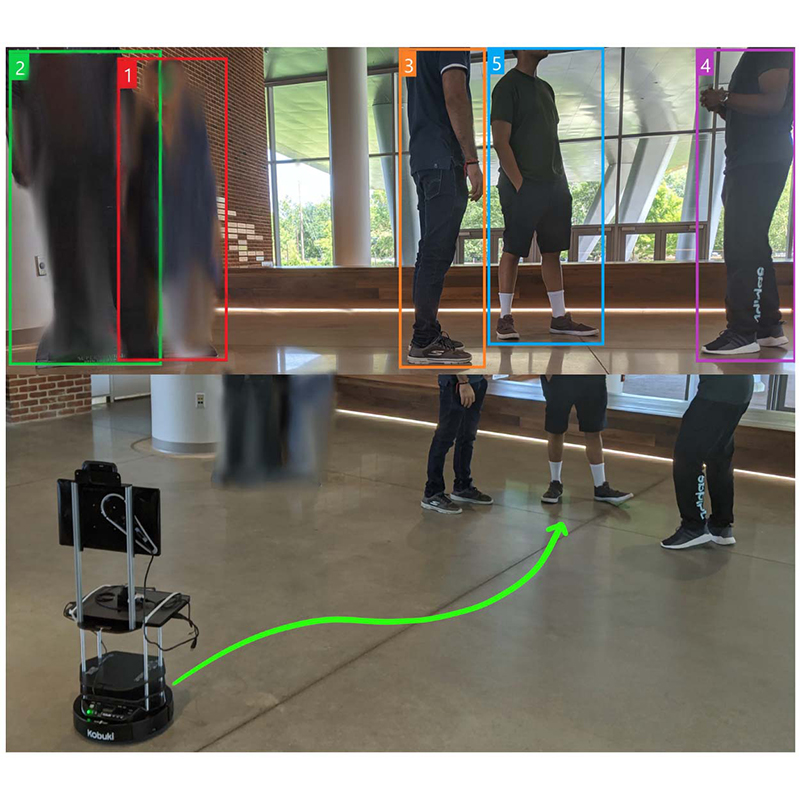
GAMMA group publishes 'COVID robot' research in PLOS One
Stories / August 3, 2021
Bee drones featured on new Voice of America video
Stories / July 21, 2021
Perception and Robotics Group creates hive of ideas for drones

Stories / April 26, 2021
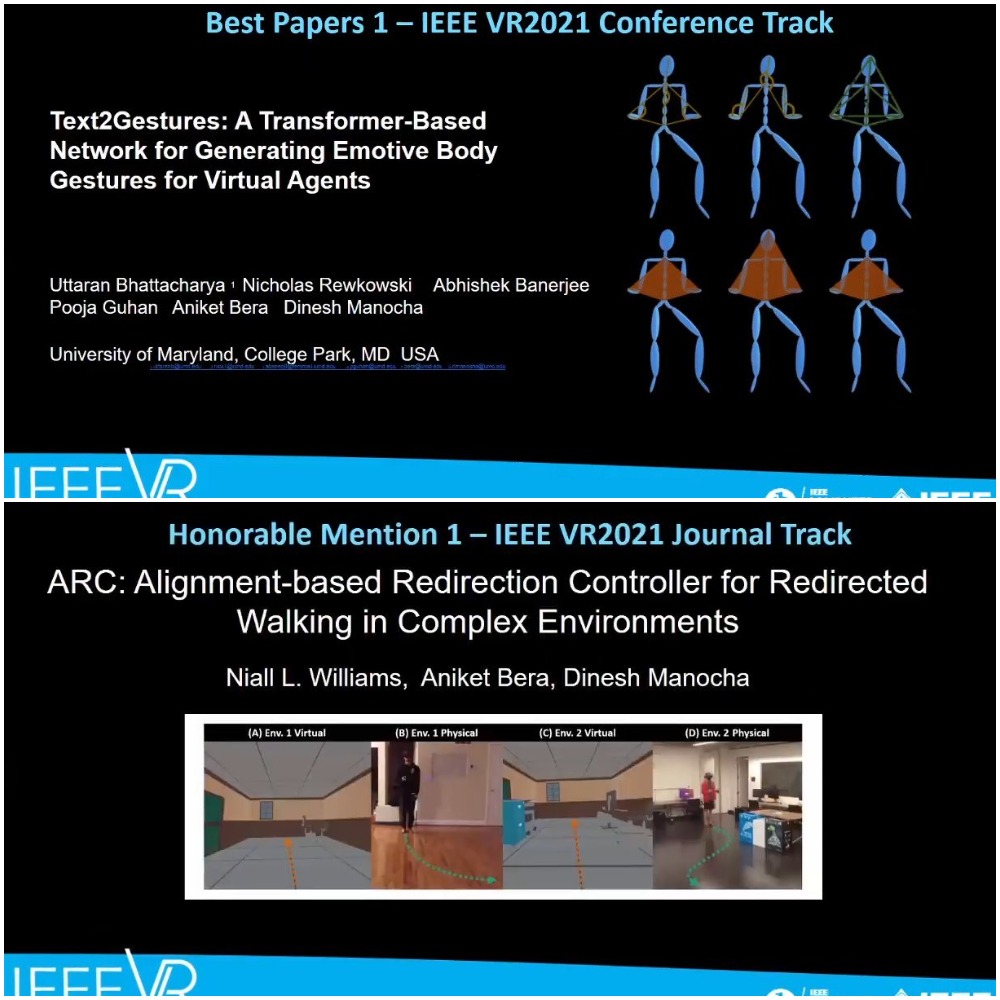
UMD GAMMA Group Awarded Best Paper and an Honorable Mention at...
Videos
Cognitive Robotics Playlist
-
 FeelAnyForce: Estimating Contact Force Feedback from Tactile Sensation
FeelAnyForce: Estimating Contact Force Feedback from Tactile Sensation -
 AcTExplore: Active Tactile Exploration on Unknown Objects
AcTExplore: Active Tactile Exploration on Unknown Objects -
 VAIolin — Music Education for All
VAIolin — Music Education for All -
 Autonomous Social Distancing in Urban Environments using a Quadruped Robot
Autonomous Social Distancing in Urban Environments using a Quadruped Robot -
 COVID-Robot: Monitoring Social Distancing Constraints in Crowded Scenarios
COVID-Robot: Monitoring Social Distancing Constraints in Crowded Scenarios -
 Crowd-Steer: Smooth and Collision-Free Navigation in Dense Scenarios Using High-Fidelity Simulation
Crowd-Steer: Smooth and Collision-Free Navigation in Dense Scenarios Using High-Fidelity Simulation -
 ProxEmo: Gait-based Emotion Learning and Multiview Proxemic Fusion for Social-Aware Robot Navigation
ProxEmo: Gait-based Emotion Learning and Multiview Proxemic Fusion for Social-Aware Robot Navigation -
 GraphRQI: Classifying Driver Behaviors Using Graph Spectrums
GraphRQI: Classifying Driver Behaviors Using Graph Spectrums -
 Realtime Simulation of Thin-Shell Deformable Materials using CNN-Based Mesh Embedding
Realtime Simulation of Thin-Shell Deformable Materials using CNN-Based Mesh Embedding -
 DenseCAvoid: Real-time Navigation in Dense Crowds using Anticipatory Behaviors
DenseCAvoid: Real-time Navigation in Dense Crowds using Anticipatory Behaviors -
 ENEE408I Squats
ENEE408I Squats -
 EVDodgeNet: Deep Dynamic Obstacle Dodging with Event Cameras [ICRA 2020]
EVDodgeNet: Deep Dynamic Obstacle Dodging with Event Cameras [ICRA 2020] -
 Robot navigation in dense crowds
Robot navigation in dense crowds -
 EV-IMO: Motion Segmentation Dataset and Learning Pipeline for Event Cameras
EV-IMO: Motion Segmentation Dataset and Learning Pipeline for Event Cameras -
 Unsupervised Learning of Dense Optical Flow, Depth and Egomotion from Sparse Event Data [Updated]
Unsupervised Learning of Dense Optical Flow, Depth and Egomotion from Sparse Event Data [Updated] -
 Robotic Imitation
Robotic Imitation -
 GapFlyt: Active Vision Based Minimalist Structureless Gap Detection For Quadrotor Flight (IROS 2018)
GapFlyt: Active Vision Based Minimalist Structureless Gap Detection For Quadrotor Flight (IROS 2018) -
 microwave demo
microwave demo -
 Realtime Pedestrian Behavior Learning for Path Prediction and Navigation
Realtime Pedestrian Behavior Learning for Path Prediction and Navigation -
 Compliant Object Cleaning
Compliant Object Cleaning -
 Visual processes of action recognition
Visual processes of action recognition -
 UMD robot that learns to cook by watching YouTube video
UMD robot that learns to cook by watching YouTube video -
 UMD robot learns to make a beverage by observing people.
UMD robot learns to make a beverage by observing people. -
 Robotic Cleaning by Scrubbing
Robotic Cleaning by Scrubbing -
 Bimanual Robotic Cleaning of Compliant Parts
Bimanual Robotic Cleaning of Compliant Parts -
 New Robot Sensing Hand for Co-robotics
New Robot Sensing Hand for Co-robotics -
 RoboSAM: Robotic Smart Assistant for Manufacturing
RoboSAM: Robotic Smart Assistant for Manufacturing -
 Baxter Robot Learning to Pour into a Moving Container
Baxter Robot Learning to Pour into a Moving Container -
 Using Failure-to-Success Transitions in an Imitation Learning Framework
Using Failure-to-Success Transitions in an Imitation Learning Framework -
 Imitation Learning of Motion Parameters for Dynamic Manipulation Tasks
Imitation Learning of Motion Parameters for Dynamic Manipulation Tasks -
 Semiautonomous Teleoperation
Semiautonomous Teleoperation -
 Stable with input output delay
Stable with input output delay -
Private video
-
Private video
-
Private video
Faculty

|
John S. BarasDistinguished University Professor301.405.6606 | baras@umd.edu Profile |

|
Cornelia FermüllerResearch Scientist301.405.1768 | fermulcm@umd.edu Profile |

|
Don PerlisProfessor Emeritus301-405-2685 | perlis@cs.umd.edu Profile |

|
Aniket BeraAssistant Research Professor301.405.4209 | ab@cs.umd.edu Profile |

|
Ruohan GaoAssistant Professor| rhgao@umd.edu Profile |

|
Chunyan YangAssociate Professor, School Psychology Program(301) 405-2858 | yangcy@umd.edu Profile |

|
Ang LiAssistant Professor| angliece@umd.edu Profile |

|
Ramani DuraiswamiProfessor(301)405-6710 | ramani@umiacs.umd.edu Profile |
|
Dinesh ManochaDistinguished University Professor301.405.2741 | dmanocha@umd.edu Profile |

|
Yiannis AloimonosProfessor301.405.1743 | jyaloimo@umd.edu Profile |

|
James A. ReggiaProfessor Emeritus301-405-2686 | reggia@cs.umd.edu Profile |

|
Jerry WuAdjunct/Lecturer301-405-6082 | jerrywu@umd.edu Profile |

|
Sudarsanam (Suresh) BabuClark Distinguished Chair301-405-3637 | sbabu123@umd.edu Profile |
Top