News Story
Alum Dimitris Tsakiris improves propulsion of robotic octopus

The robotic octopus developed by Dimitris Tsakaris's research group at FORTH.
Tsakiris is principal researcher in the Computational Vision and Robotics Laboratory in the Institute of Computer Science at the Foundation for Research and Technology-Hellas (FORTH). He earned his Ph.D. in Electrical Engineering in 1995, advised by Professor P. S. Krishnaprasad (ECE/ISR)
"Multi-arm Robotic Swimming With Octopus-Inspired Compliant Web," by Michael Sfakiotakis, Asimina Kazakidi, Avgousta Chatzidaki, Theodoros Evdaimon and Tsakiris, showed how adding a soft and supple silicone web has nearly doubled the speed of the lab’s robotic octopus, which also can crawl, carry objects, and swim freely.
The paper reveals that the robot octopus swims at just over 100 millimeters per second with arms only, but up to 180 mm/s (or 0.5 body lengths per second) with the new web design. In addition, the robot’s efficiency (aka overall cost of transport, the ratio of the energy put in over the resulting speed) for the arms-only version is 0.85, whereas the web drops the number down to 0.62.
Watch the robot in action: swimming with arms only vs. with the web, crawling, swimming while carrying an object, and swimming in open water.
Published September 29, 2014
Related Stories
Stories / March 30, 2018
Alumnus Philip Twu's exciting career in space robotics

Stories / March 29, 2017
Alumnus Fumin Zhang promoted to full professor at Georgia Tech

Stories / July 3, 2023
ECE and ISR alumni feature prominently at American Control...
Stories / June 19, 2023
Alum Sean Andersson named Mechanical Engineering Department...
Stories / February 20, 2023
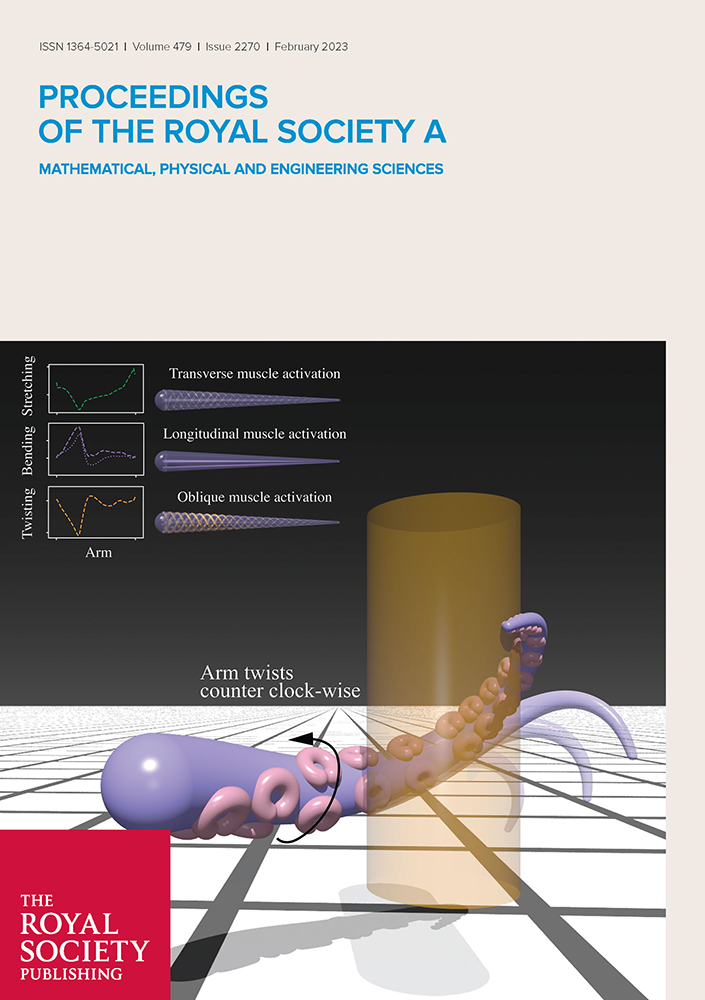
Alumnus Udit Halder’s work published as cover article in...
Stories / January 19, 2023
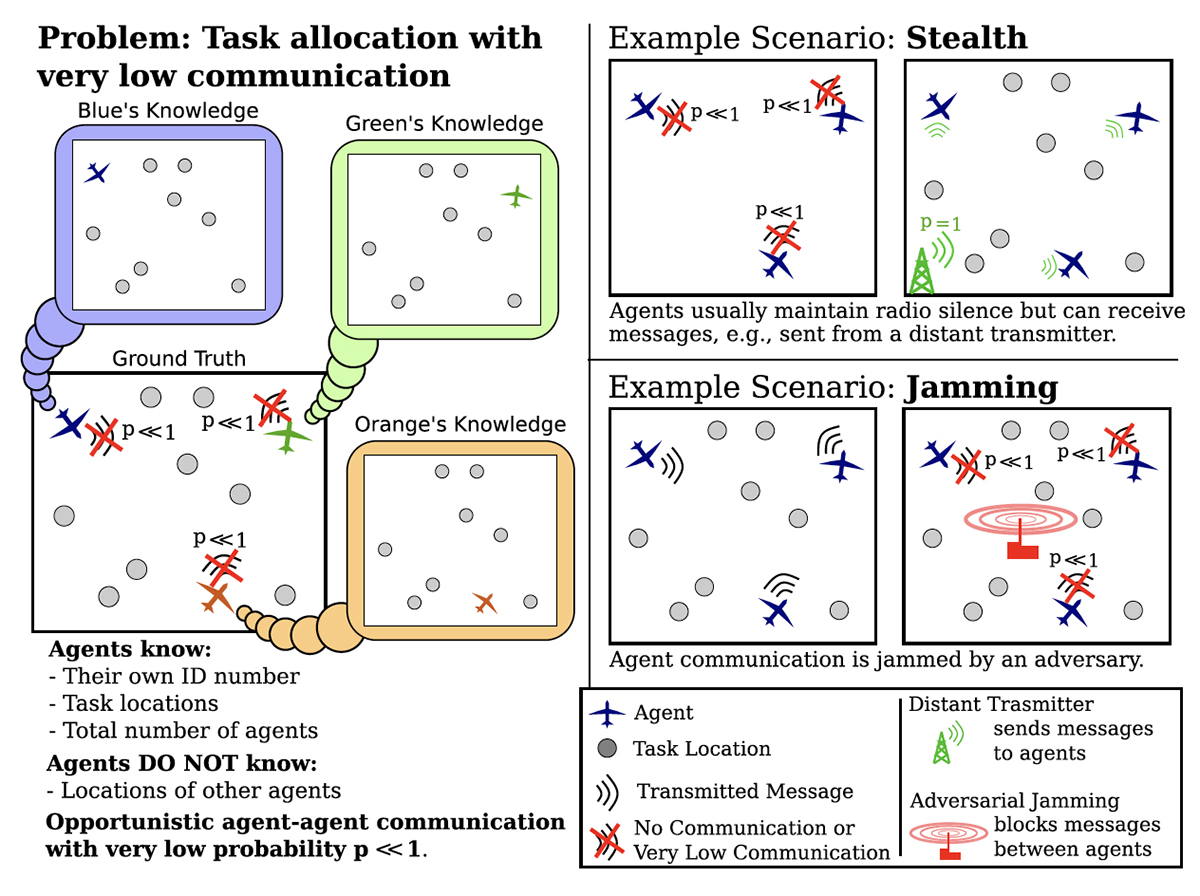
New algorithms for multi-robot systems in low communication...
Stories / February 7, 2022
MRC and MAGE Earn ARM Institute Endorsement

Stories / December 9, 2021
Alum Nitin Sanket wins Larry S. Davis Doctoral Dissertation...

Stories / August 19, 2021
Alum George Kantor working on AI for agricultural robotics
Stories / October 12, 2020
$100,000 investment from Amazon to power Clark School...
